
DLD05A3-3N / DLD20A5-5N 5m/20m Obstacle Avoidance Laser Radar

Turning “seeing the world” into an engineering capability, LiDAR has traveled more than half a century — from research prototypes to must-have sensors for industrial automation, AGV/AMR navigation, robotic obstacle avoidance, perimeter security, and zone protection. This timeline explains how the technology got here — and answers a practical question buyers and operators care about most: can it stay stable on the line?
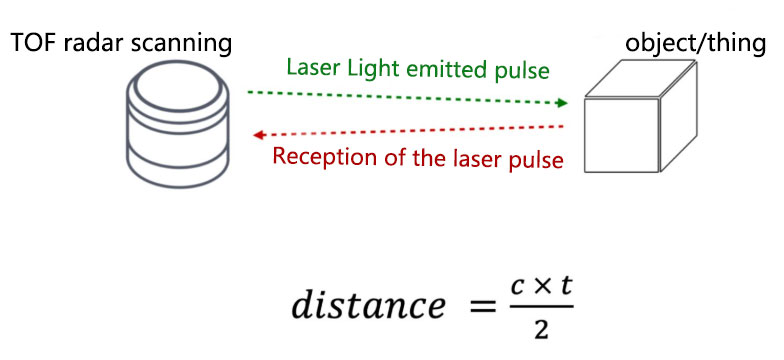
Time of Flight (TOF) made optical ranging practical: emit a laser pulse, measure the round-trip time Δt, and estimate distance as c·Δt/2. Early instruments were bulky and power-hungry, mostly for defense and science. Critical building blocks — semiconductor lasers, photodetectors (APD/SiPM), and pulse shaping — took shape. To turn point measurements into scans, engineers developed repeatable optical mechanisms: spinning mirrors, galvos, and polygon scanners.
Safety baseline: products follow IEC 60825-1 for laser eye safety; most industrial LiDARs target Class 1.
Keywords: laser ranging, TOF, pulsed laser, rotating mirror scanning, photodetection, IEC 60825-1
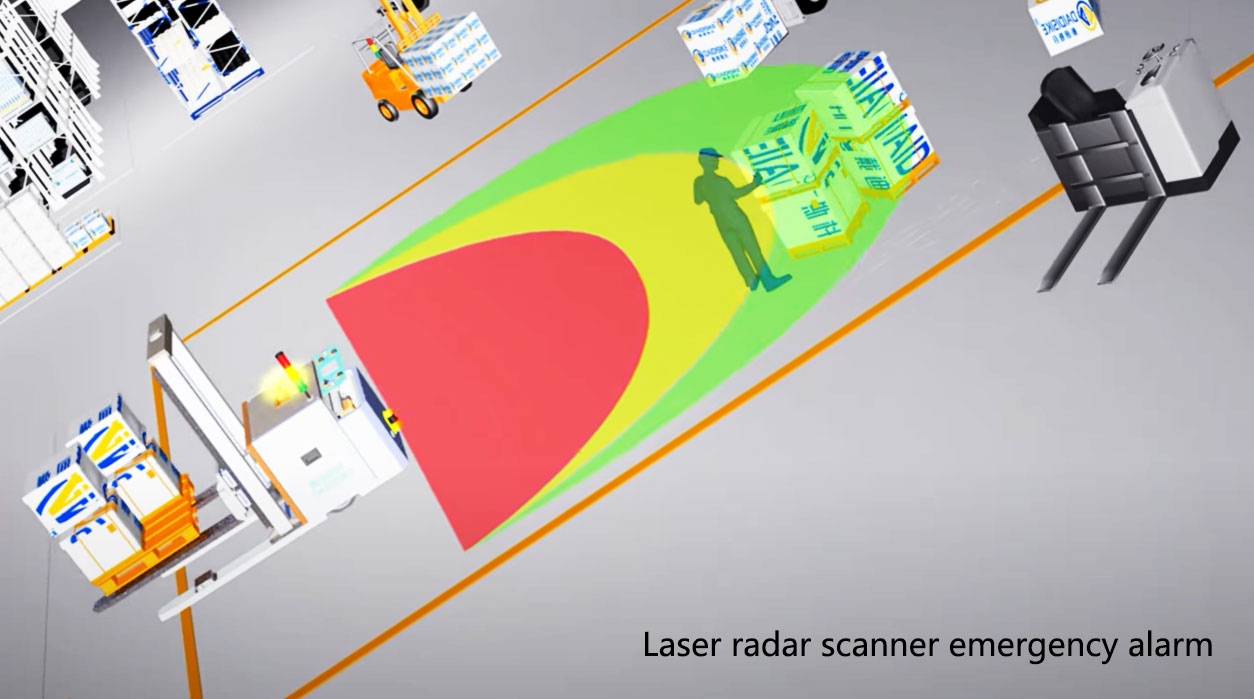
A classic 2D LiDAR pairs a transmitter/receiver with a rotary or oscillating mechanism to build a polar point cloud. Early deployments focused on obstacle detection and zone protection: define protection/warning areas; if breached, output I/O to interlock a stop.
Functional safety context: LiDARs used in protective functions are commonly engineered with the thinking of ISO 13849-1 (PL), IEC 61508 (SIL), and EN 62061 — risk assessment, redundancy, diagnostics, and verifiable interlocks.
Keywords: 2D LiDAR, scanning rangefinding, zone protection, perimeter security, RS485/Modbus, functional safety
Narrow aisles, glass shelving, and harsh lighting can cause drift or loss when you only have 2D + odometry. The response was multi-beam / solid-state 3D LiDAR plus SLAM (front-end features, loop closure, back-end optimization). The ecosystem matured: ROS/SDK support, multi-sensor fusion (camera + LiDAR + IMU), and native PLC/IPC communications.
Mobile robot safety: ISO 3691-4 raised expectations for obstacle avoidance, speed limits, and emergency stops on AGV/AMR platforms.
Keywords: 3D LiDAR, point cloud, SLAM, AGV/AMR navigation, ROS, ISO 3691-4
The real bar is not hitting spec once, but doing it every shift:
Engineering answers buyers value:
Keywords: glare immunity, low latency, high refresh rate, flexible zoning, IP rating, reliability, fast integration

Keywords: industrial automation, AGV/AMR navigation, dynamic obstacle avoidance, perimeter security, EHS, zone protection, false-alarm rate
| Focus | Pragmatic Check | Why It Matters |
|---|---|---|
| Range | Match 5 / 10 / 20 / 40 m… to obstacle size, speed, stopping distance | Rated range ≠ effective detect distance; reflectivity matters |
| Resolution & Repeatability | Millimeter-class? Edge / thin-object performance | Datasheet specs need robust echo processing to hold up on site |
| Refresh & End-to-End Latency | ≥ 20–30 Hz for fast motion; minimize total latency | Defines the “see → brake” reaction window |
| Interference Immunity | Glare, black surfaces, glass, reflective metals, dust / oil mist | Direct impact on false / missed alarms and maintenance load |
| Zoning Strategy | Multi-zone protection / warning, logs exportable | Supports EHS audits and traceability |
| Interfaces & Ecosystem | RS485/Modbus, digital I/O, Ethernet, ROS/SDK | Cuts gateway / dev costs; shortens commissioning |
| Environment Fit | IP rating, vibration, wide temp (e.g. −10–+50 °C), anti-soil | Determines real 24/7 uptime |
| Compliance & Safety | Laser Class 1; interlock path verifiable | Aligns with ISO 13849-1 / IEC 61508 practices |
Keywords: OEE, data traceability, maintainability, interlock loop, reduced downtime
The story of LiDAR is the story of turning a beam of light into stable capabilities for safety, throughput, and data. Expect continued gains in echo logic, frame rates at lower power, and deeper fusion with vision and ultrasonics. For smart manufacturing and mobile robots, LiDAR will remain a primary viewpoint sensor.
For obstacle detection, zone protection, perimeter security, and AGV/AMR navigation, we provide multiple ranges, standard interfaces, and quick-integration options:
DLD05A3-3N / DLD20A5-5N (5 m / 20 m) — Obstacle-Avoidance LiDAR
Use cases: narrow-aisle AGV avoidance, station intrusion detection, near-field machine guarding.
Highlights: high refresh, low end-to-end latency, RS485/Modbus + digital I/O, dual Protection / Warning zones (polygon / fan).
5JPTG / 10JPTG (5 m / 10 m) — Scanning Rangefinder Radar
Use cases: small mobile platforms, service robots, light-duty AMR.
Highlights: millimeter-class resolution, lightweight, integration-friendly power & interfaces, SDK / protocols for rapid development.
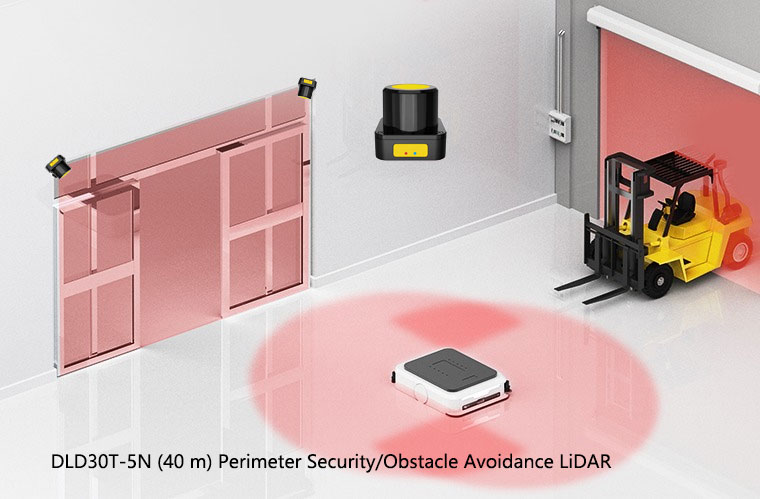
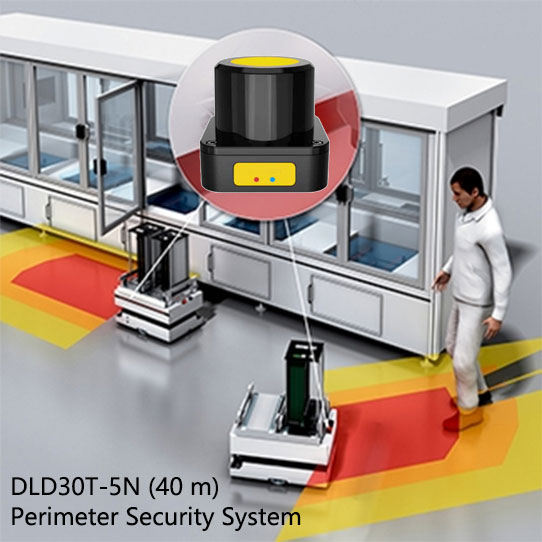
DLD30T-5N (40 m) — Perimeter Security / Obstacle-Avoidance LiDAR
Use cases: campus / yard channels, semi-outdoor patrol, long-range zone protection.
Highlights: glare / reflector immunity, multi-zone configuration, industrial IP protection, exportable logs / alarms.
One-line conclusion: An obstacle-avoidance (safety) LiDAR is built for people & machine safety and provides safety-rated outputs. A navigation LiDAR is built for mapping and localization, outputting point clouds / ranges to algorithms and does not perform safety stop functions. Their roles, interfaces, and compliance paths are entirely different and not interchangeable.
| Dimension | Obstacle-Avoidance (Safety LiDAR) | Navigation (SLAM / Mapping LiDAR) |
|---|---|---|
| Primary purpose | Personnel / equipment safety: entering a protective or warning field triggers interlock, deceleration, or emergency stop | Build maps, localize, and plan paths; provide raw data to avoidance / planning algorithms |
| Output format | Dual-channel OSSD, safety Ethernet, zone status bits; on-board zone logic and self-diagnostics | Point cloud / range / intensity (Ethernet / serial); processed by upper-layer navigation stacks (e.g. ROS) |
| Compliance & safety level | Designed and assessed for safety applications (typical target: safety functions at PL d / SIL 2 level) | No safety-function rating; not used directly for safety stopping |
| Engineering metrics | Safety response time, fail-safe behavior, diagnostic coverage, zone switching, immunity to reflections / dust / high ambient light | Angular resolution, scan frequency, range, point-cloud consistency, drift & loop-closure robustness |
| System architecture | Interlocks directly with braking circuits / safety PLC; supports EDM / automatic reset interlocks | Algorithms compute motion commands; control layer issues speed / path after perception |
| Typical placement | Low-mounted / peripheral to cover human ingress risk zones | High or corner mount for complete environmental coverage |
| Typical applications | AMR / AGV safeguarding, forklift retrofits, hazardous-area perimeter guarding, machine guarding | SLAM mapping, localization, path planning, narrow-aisle traversal, global obstacle avoidance |

Mount a safety LiDAR low at the front; configure protective / warning fields and speed zones; interlock directly with the braking chain to cover frontal and diagonal ingress.
Mount a navigation LiDAR on the top or corners; feed point clouds to SLAM / localization and planning for corridors, turns, and narrow aisles.
Safety layer has the highest priority. The navigation layer handles speed / path only; once a safety trigger occurs, the vehicle must enter a safe state.
Q1: Can one LiDAR do both navigation and safety?
A: Not recommended. Goals, interfaces, and conformity differ. Engineering practice uses a separated scheme: safety LiDAR (interlocked stopping) + navigation LiDAR (mapping / localization) to reduce conformity and maintenance risks.
Q2: What about black objects or glass doors that are hard to detect?
A: Increase resolution or integration time; adjust incidence angle by 5–10°; apply anti-glare film or choose higher-power models; always validate with worst-case material samples.
Q3: How do I size protective vs warning fields?
A: Compute the minimum protective field from max speed, total system delay, and braking capability; keep a 20–40 % margin as a warning field for tuning and environmental drift.
Q4: Do I need re-acceptance after changing models?
A: If the sensor model or zone logic changes, re-test max-speed stopping and field borders, and archive parameters and logs to ensure the safety function is unaffected.

